Robotik Kodlama Kavramları ve Anlamları
| Robotik Kodlama Kavramlar | Tanımı | Örnekler ve Kullanım Alanları |
|---|---|---|
| Dron Takibi | Uçan hava araçlarının konumunu ve hareketlerini belirleme ve izleme tekniğidir. | Üretim tesislerinin hava alanının kontrolü ve hava trafiğinin izlenmesi. |
| Robotik Görüntü İşleme | Bir robotun etrafındaki nesneleri tanımlamasını sağlayan bir bilgisayar yazılımı ve yöntemidir. | Robotların çevresindeki insanların yüzlerini tanıması. |
| Robotik Doğrusal Hareket Sistemleri | Robotik sistemlerin hareketini kontrol etmek için kullanılan sistemlerdir. | Bir parçanın doğrusal olarak belirli bir mesafeye veya noktaya gitmesini sağlamak. |
| Robotik Simülasyonlar | Sistemin nasıl çalışacağının öngörülmesi ve test edilmesi için yapılan yazılım yardımcılı bir araç. | Bir robotun hareketlerinin bir virüsün yayılmasının simülasyonu. |
| Robotik Kontrol Paneli | Bir robotik sistem veya bir mekanizma için kullanılan bir kontrol arayüzdür. | Robotun görevlerini kontrol etmek, programlamak ve hata ayıklamak. |
| Otomatik Düzeltme Sistemleri | Otomatik olarak veri düzeltme işlemlerini gerçekleştiren bir tür bilgisayar programı veya donanımıdır. | Mevcut veri setlerinin doğruluğunu ve güvenilirliğini artırmak. |
| Öğrenme | Robotların yeni görevleri ya da hareketleri öğrenmesi. | Robotların gelişimini ve yeteneklerini artırmak. |
| Gerçek Dünyadaki Uygulamalar | Robotların gerçek dünyada kullanışlı ve verimli bir şekilde işlev görmesi. | Endüstriyel robotlar, servis robotları, hava ve deniz araçları. |
| Programlama Dilleri | Robotları kontrol etmek ve yönetmek için kullanılan yazılım dilleri. | Python, C++, Java gibi dillerle robotların programlanması. |
| Kodlanmış Hareketler | Robotların belirli bir hareketi yapabilmesi için önceden programlanmış komutlar. | Bir robotun belirli bir işlemi otomatik olarak gerçekleştirebilmesi. |
Robotik Kodlama, robotik sistemlerin tasarımı ve programlanmasına yönelik dünya çapındaki bir etkinlik olup, çoğu insan için kompleks bir konu gibi görünür. Robotik Kodlama, robotik sistemlerin görünürlüğünü ve ölçeklenebilirliğini artırmanın temel öğelerini kapsar. Bu makalede, Robotik Kodlama kapsamında önemli kavramlar ve terimleri inceleyeceğiz.
Robotik Kodlama Kavramları Nelerdir?
Robotik kodlamanın temel kavramları, öğrenme, gerçek dünyadaki uygulamalar, programlama dilleri ve kodlanmış hareketleri içerir. Bunlar, robotik sistemlerin tasarlanması ve programlanmasının temel bileşenlerini oluşturmak için kullanılır. Robotik kodlama kavramlarının ne olduğunu ve neden önemli olduğunu anlamanıza yardımcı olacak bu listeyi sizin için hazırladık.
| Öğe | Açıklama |
|---|---|
| Robotik Kodlama | Robotların hareket, algılama ve karar verme yeteneklerini sağlayan yazılım kodlarının yazılması ve düzenlenmesi sürecidir. |
| Programlama Dilleri | Robotik kodlamada kullanılan diller arasında Python, C/C++, Blockly, Java ve JavaScript gibi diller bulunur. |
| Donanım Platformları | Robotik kodlamada kullanılan popüler donanım platformları: Arduino, Raspberry Pi, LEGO Mindstorms, Micro:bit ve VEX Robotics. |
| Sensörler | Robotlara çevrelerini algılama yeteneği sağlayan bileşenlerdir. Örnekler: ultrasonik sensörler, kızılötesi sensörler, dokunma sensörleri, ışık sensörleri ve renk sensörleri. |
| Aktüatörler | Robotların hareket etmesini sağlayan bileşenlerdir. Örnekler: motorlar, servo motorlar ve lineer aktüatörler. |
| Kontrol Sistemleri | Robotların algılama, karar verme ve eylem gerçekleştirme yeteneklerini düzenleyen sistemlerdir. Örnekler: merkezi işlem birimi (CPU), mikrodenetleyiciler ve mikroişlemciler. |
| Algoritmalar | Robotik kodlamada kullanılan algoritma türleri arasında hareket planlama, yörünge kontrolü, nesne tanıma ve yapay zeka bulunur. |
| Simülasyon Yazılımları | Robotik sistemlerin sanal ortamda test edilmesini sağlar. Örnekler: ROS (Robot Operating System), Gazebo, V-REP ve Webots. |
| Uygulama Alanları | Robotik kodlama endüstriyel otomasyon, insansız hava araçları, otonom araçlar, ev otomasyonu, eğitim ve sağlık sektörlerinde kullanılır. |
| Eğitim Kaynakları | Robotik kodlama öğrenmek için kitaplar, online kurslar, eğitim setleri, projeler ve atölyeler bulunur. |
Dron Takibi: Dron Takibi, uçan hava araçlarının konumunu ve hareketlerini belirleme ve izleme tekniğidir. Dron takibi, gelişen teknoloji ile entegre edilen hava araçlarının herhangi bir çevre içerisinde hassas bir şekilde takibi ve hareketlerinin kontrolünü sağlamak için kullanılan bir süreçtir. Teknolojideki gelişmelere bağlı olarak, dron takibi araçlarının çeşitli hava altı ve yüksek hızda uçabilmelerine de olanak sağlamaktadır.
Örnek olarak, bir üretim tesisinin hava alanının takibi ve kontrolü için kullanılan dron takibi teknolojisi, çalışanların çevrelerindeki tesise ait hava alanının kontrolünü sağlamak için kullanılabilir. Dron takibi teknolojisi, hava alanının veya çevresindeki hava trafiğinin herhangi bir zamanda izlenmesine olanak sağlar. Böylece, hava alanında güvenlik açısından risklerin önlenmesi ve gerekli kontrollerin yapılması mümkün hale gelir.
Robotik Görüntü İşleme: Robotik Görüntü İşleme, bir robotun etrafındaki nesneleri tanımlamasını sağlayan bir bilgisayar yazılımı ve yöntemidir. Bu yöntem, robotun görüntülerini algılamasını, anlamasını ve onların hareketlerini kontrol etmesini sağlar. Akademik tanım olarak, robotik görüntü işleme, robotik sistemlerin etrafındaki nesneleri algılamasını sağlayan, görüntüleri tanımlayan ve görüntüleri işleyen yöntemleri ve teknolojileri ifade eder.
Örnek olarak, bir robotun çevresindeki insanların yüzlerini tanımasını sağlamak için, robotik görüntü işleme teknolojisi kullanılır. Bu teknoloji, robotun çevresindeki insanların yüzlerinin görüntülerini algılamasını ve tanımasını sağlar. Robot, bu işlem sonucunda görüntülü bilgileri işleyerek, insanların yüzlerini tanıyarak, onların hareketlerini kontrol edebilir.
Robotik Doğrusal Hareket Sistemleri: Robotik Doğrusal Hareket Sistemleri, robotik sistemlerin hareketini kontrol etmek için kullanılan sistemlerdir. Bu sistemler, robotik sistemlerin, doğrusal olarak belirli bir mesafeye veya noktaya hareket etmesini sağlar. Akademik olarak, bu sistemler, robotik sistemlerin mekanik parçalarının, doğrusal olarak belirlenen bir mesafeye veya noktaya gidebilmesini sağlamak için gerekli komutların yönetilmesini ve kontrol edilmesini içerir. Örnek olarak, bir robotik sistemde, bir parçanın doğrusal olarak belirli bir mesafeye veya noktaya gidebilmesi için, doğrusal hareket sistemleri kullanılarak, çeşitli motorlar ve diğer mekanik parçaların kontrolünün sağlanması gerekir.
Robotik Simülasyonlar: Robotik Simülasyonlar, robotik, mekanik veya diğer sistemlerin gerçek dünyada deneyimlenemeyecek olması durumunda, sistemin nasıl çalışacağının öngörülmesi ve test edilmesi için yapılan yazılım yardımcılı bir araçtır. Akademik tanım olarak, robotik simülasyonlar, bir sistemin, mekanik veya diğer türlerinin, 3 boyutlu ortamda çoğaltılması, çalışma koşullarının değiştirilmesi veya gerçek zamanlı veya gerçek zamanlı olmayan simülasyonlar için yazılım yardımcılı bir araç olarak tanımlanabilir.
Örnek olarak, robotik simülasyonlar, bir robotun hareketlerinin bir virüsün yayılmasının simülasyonu için kullanılabilir. Robot, ekranda gösterilen koordinatları takip ederek, virüsün yayılmasının farklı durumlarda nasıl etkileyeceğini öngörmek için kullanılabilir.
Robotik Kontrol Paneli: Robotik Kontrol Paneli, bir robotik sistem veya bir mekanizma için kullanılan bir kontrol arayüzüdür. Bu, bir robotik sistemi kontrol etmek için kullanılan bir arayüz, yani bir tür kumanda konsoludur. Robotik kontrol paneli, bir robotun görevlerini kontrol etmeye, programlamaya ve hata ayıklamaya izin veren bir arayüzdür.
Örnek olarak, bir robotik kontrol paneli, robotun görevlerini kontrol etmek, programlamak ve hata ayıklamak için kullanılabilecek bir arayüzü içerir. Panel üzerinde, robotik sistemin hareket komutlarını ayarlayabileceğiniz bir dizi kontrol tuşu veya düğmesi bulunur. Ayrıca, robotun görevlerini programlamak için kullanılabilecek bir kodlama arabirimi de mevcut olabilir.
Otomatik Düzeltme Sistemleri: Otomatik Düzeltme Sistemleri, bir tür bilgisayar programı veya donanımıdır. Bu sistemler, mevcut veri içeriklerinin doğruluğunu ve üstünlüğünü arttırmak için kullanılan algoritmalar veya kodlarla otomatik olarak veri düzeltme işlemlerini gerçekleştirir. Akademik tanımda, Otomatik Düzeltme Sistemi, düzeltilebilir veri içeriklerinin doğruluğunu ve üstünlüğünü arttırmak için kullanılan algoritmalar veya kodların, bir bilgisayar programı veya donanımı olarak tanımlanmasıdır.
Örnek olarak, Otomatik Düzeltme Sistemi, bir metin editöründe kullanılabilecek bir yazım yanlışı düzeltme programı olabilir. Yazım yanlışları, program tarafından otomatik olarak düzeltilir. Program, herhangi bir yazım yanlışını algılar ve doğru forma çevirmek için gerekli olan değişiklikleri yapar.
Robotik Kontrol Mekanizmaları: Robotik Kontrol Mekanizmaları robotik sistemleri hareket ettiren ve kontrol eden mekanizmaları ifade eder. Robotik sistemleri direkt olarak kontrol etmek için kullanılan sensörler, sürücüler, kontrolörler, akıllı cihazlar ve diğer mekanik kısımlar bu kategoride yer alır. Akademik tanım olarak, robotik kontrol mekanizmaları; konum, hız ve hareket kontrolünden sorumlu olan mekanik, elektronik ve bilgisayarlı sistemlerin bir kombinasyonudur.
Örnek olarak, bir robotik sistem bir kolu hareket ettirmek için bir sürücü kullanır. Sürücü, robotun kolunu istenen konuma taşıyabilmek için gerekli olan gücü sağlar. Robotun kolunun istenen konuma getirilmesi için sürücüye kontrol sinyalleri gönderilir ve kontrol sinyali tepki olarak kolun konumunu değiştirir. Bu, robotik kontrol mekanizmasının nasıl çalıştığının bir örneği olarak verilebilir.
Robotik Dizayn ve Tasarım: Robotik Dizayn ve Tasarım, robotik sistemlerin dizayn ve tasarımının yapılmasını ifade eden bir terimdir. Bu terim, robotik (mühendislik) sistemlerinin dizaynını ve tasarımının tasarlanması, kodlanması, yapılandırılması veya değiştirilmesi sürecini kapsamaktadır. Akademik tanım olarak, robotik dizayn ve tasarım, robotların yapılandırılması ve çalışma prensipleri üzerinde deneyler yapılarak, programlanması ve tasarımının daha iyi bir şekilde gerçekleştirilmesi için uygulanan süreç olarak tanımlanmaktadır.
Örnek olarak, bir otomatik kapı kontrol sistemini tasarlayarak örnek verebiliriz. Burada, kontrol sistemi için bir tasarım oluşturmak, bunu kodlamak ve yapılandırmak için robotik dizayn ve tasarım teknikleri kullanılabilir. Sistemin nasıl çalışacağını, kontrol sinyallerini ve diğer parametreleri tasarlayarak, bu sistemi kurabilir ve kullanıma sunabiliriz.
İleri Kontrol Teknikleri: İleri Kontrol Teknikleri, robotik kodlama pozisyonunda, mesleğinde, departmanında, sektöründe ve işinde kullanılan bir terimdir. İleri Kontrol Teknikleri, çok kompleks sistemleri etkin bir şekilde kontrol etmek için kullanılan algoritmaların bir kombinasyonudur. Bu teknikler, sistemlerin tahmini bir çıktı almasını ve girdileri öngörülebilir bir şekilde değiştirmesini sağlamak için kullanılan matematiksel veya sayısal yaklaşımlardır.
Örnek olarak, bir robotun hareketini kontrol etmek için kullanılan İleri Kontrol Teknikleri, sürekli olarak konum bilgisini kullanarak güncellenen bir kontrol sistemi ile sağlanır. Robotun pozisyonu, hızı ve yönü, her adımda güncellenen kontrol sistemi tarafından kontrol edilir ve robotun güncellenen konumunu doğru bir şekilde uygulamak için güncellenen komutlar sağlanır.
Robotik Algılama için Veri Bölütleme: Robotik Algılama için Veri Bölütleme, kullanılan verileri algoritma tarafından daha kolay işlenebilir parçalardan oluşan düzenli bir biçime dönüştürmek için kullanılan bir tür veri madenciliği tekniğidir. Veri bölütleme, herhangi bir veri setindeki girdilerin ve çıktıların arasındaki ilişkileri belirlemeyi ve verileri daha küçük parçalara ayırmayı amaçlar. Akademik tanım olarak, Veri Bölütleme, çeşitli algoritmaların veri kümelerini analiz etmeyi ve anlamlı bilgiler çıkarmayı sağlayan bir veri madenciliği tekniğidir.
Örnek olarak, evrensel olarak kullanılan bir robotik algılama sisteminde, kullanılan veri bölütleme yöntemi, sensörler aracılığıyla elde edilen verilerin sınıflandırılmasını ve daha kolay işlenebilir biçimde işlenmesini sağlamak için kullanılabilir. Verinin sınıflandırılması, ağırlıklandırılması ve küçük parçalara bölünmesi gibi tekniklerin kullanılmasını gerektirir.
Kontrol Sistemleri Tasarımı: Kontrol Sistemleri Tasarımı, robotik kodlama pozisyonunda, mesleğinde, departmanında, sektöründe ve işinde kullanılan bir terimdir. Kontrol Sistemleri Tasarımı, çevresel sinyallerin kontrol edilmesi için bilgisayar sistemlerinin veya mekanik cihazların tasarımının ve kullanımının konusudur. Akademik tanım olarak, kontrol sistemleri tasarımı, çevresel sinyallerin alınması, işlenmesi ve sonuç olarak sistemin çıktısının kontrol edilmesi için gerekli olan bilgisayar sistemleri ve mekanik sistemlerin tasarımını içerir.
Örnek olarak, robotik bir sistemde, bir araca karşı çevresel bir sinyal algılanması için, kamera veya sensörlerin tasarımı ve kontrol sistemlerinin yazılımının nasıl yapılacağını örnek olarak vermek mümkündür. Kamera veya sensörler tarafından alınan sinyallerin işlenmesi ve sistemin çıktısının kontrol edilmesi için, bilgisayar sistemlerinin ve mekanik sistemlerin tasarımının nasıl yapılacağının kontrol sistemleri tasarımı olarak adlandırıldığını görebilirsiniz.
Endüstriyel Robotik Entegrasyon: Endüstriyel robotik entegrasyon (Industrial Robotics Integration), robotik alanında çalışan kişilerin endüstriyel sistemlerdeki robotik teknolojilerin entegrasyonu ile çalışmalarının bir parçasıdır. Endüstriyel robotik entegrasyon robot teknolojisinin tasarlanması, programlanması, kurulması, ayarlanması ve test edilmesi gibi tüm aşamalarını kapsamaktadır.
Örnek vermek gerekirse, fabrikalarda üretim seviyesini artırmak için robot kullanılabilir. Endüstriyel robotik entegrasyon, bu robotların fabrika içinde nasıl kullanılacağını, nasıl etkinleştirileceğini ve nasıl denetleneceğini belirlemek için gerekli olan teknik çalışmaların süreci olarak tanımlanabilir. Bu süreç, robotun tasarımından, programlanmasına, kurulmasına, ayarlanmasına ve test edilmesine kadar her aşamayı kapsar.
İnsan-Makine İletişimi: İnsan-Makine İletişimi (HMI), insan ve makine arasındaki etkileşim ve bilgi akışını tanımlayan genel bir terimdir. İnsanların ve makinelerin bilgiyi algılamaları, anlamaları ve alışverişlerini nasıl gerçekleştireceklerini belirleyen bir teknolojidir. HMI, arayüzlerin, denetimlerin, kontrol sistemlerinin ve veri toplama aygıtlarının kullanımını içerir. Akademik olarak, insan-makine iletişimi, bir insanın bir makineyi kullanması veya etkileşim kurması için gerekli olan temel arayüzleri belirleyen bir kavramdır.
Örnek olarak, bir robot tarafından işlenen bir parça üretirken, insan-makine iletişimi, robotun kullanıcı arayüzünden girilen komutları algılayarak, parçayı üretmek için gerekli adımları gerçekleştirmesine izin verecek şekilde tasarlanır. Robotun kullanıcı arayüzünde, komutlar veya girişleri girmeye yarayan görsel, işitsel veya dokunmatik arayüzler kullanılır.
Robotik Kavrama ve Manipülasyon: Robotik Kavrama ve Manipülasyon, robotik bilimin temel kabiliyetlerinden biridir. Bu terim, bir robotun kavrama ve manipülasyon kabiliyetlerini tanımlamak için kullanılır. Robotik kavrama ve manipülasyon aracılığıyla robotlar belli bir nesneyi alıp taşıyabilir, yerini değiştirebilir veya bir uzaya yerleştirebilirler. Akademik tanım olarak, robotik kavrama ve manipülasyon, bir robotun kullandığı mekanizmalar ve algoritmaları kullanarak çevresindeki nesneleri algılaması, alıp taşıması ve manipüle etmesi olarak tanımlanabilir.
Örnek olarak, Amazon tarafından kullanılan bir otomatik depolama ve dağıtım sistemi örnek verilebilir. Sistem robotlar tarafından kontrol edilir ve bu robotlar, deponun içindeki çeşitli nesneleri algılar ve onları depolama alanından paketleme alanına taşıyarak ürünleri paketler ve gönderir.
İnsansız Araçlar İçin Kontrol Sistemleri: 'İnsansız Araçlar İçin Kontrol Sistemleri' terimi, insansız aracın (örneğin, uçan aracı, deniz aracı, araba vb.) çalışmasının kontrol edilmesi için kullanılan bir sistem olarak tanımlanır. Bu sistemler, robotların ve diğer insansız araçların çalışmalarını ve kontrol sürecini daha güvenli, verimli ve hatasız hale getirmek için tasarlanmıştır. Akademik tanım olarak, insansız araçlar için kontrol sistemleri, çevredeki değişkenleri izleyen veya tahmin eden, aracın kontrol edilmesi için kullanılan algoritmalardır. Örnek olarak, bir uçan aracın sınırları kontrol etmek için kullanılan bir kontrol sistemi, uçan aracın algılaması veya izlemesi gereken bir bölge belirleyecek ve aracın konumunu yakından izleyerek güvenli bir seviyede uçmasını sağlayacaktır.
Robotik Algılamada Örüntü Tanıma: Robotik Algılamada Örüntü Tanıma, bir robotun çevresindeki nesneleri tanımasını sağlamak için kullanılan bir algoritmadır. Bu algoritma, robotun çevresindeki nesneleri tanımak için örneklerin çevresindeki özellikleri veya özelliklerin özelliklerini kullanır. Akademik tanım olarak, Robotik Algılamada Örüntü Tanıma, robotik algılamada iki veya daha fazla özellik arasındaki ilişkiyi belirleyen ve örneklerden özellikleri çıkaran bir yöntemdir.
Örnek olarak, bir robotun bir kapıyı algılamasını sağlamak için,Robotik Algılamada Örüntü Tanıma kullanılabilir. Robot, çevresindeki bir kapının özelliklerini (renk, boyut, şekil, vb.) algılar ve bu özelliklerin örneklerindeki kapılarla ne kadar benzediğini hesaplar. Eğer özellikler arasındaki benzerlik yeterli ise, robot kapıyı tanıyarak kapının özelliklerini doğru bir şekilde algılayabilir.
Robotik Hareket Sensörleri: Robotik Hareket Sensörleri, robotik sistemlerin hareketli parçalarının robotik hareketlerini tespit etmesini sağlayan elektronik sensörlerdir. Bir robotik sistemin hareketli parçalarının konumunu, hızını ve yönünü tespit etmek için kullanılırlar. Akademik tanımı olarak, Robotik Hareket Sensörleri, robotik sistemlerin hareketli parçalarının konumunu, hızını ve yönünü tespit etmek için kullanılan, hareket veya pozisyonu ölçmeye yönelik elektronik sensörlerdir.
Örnek olarak, bir robotik elin pozisyonunu ölçmek için, elin her bir parçasına bir Robotik Hareket Sensörü takılır. Elin hareketini tespit etmek için her bir sensör, elin her bir parçasının belirli konumlarının pozisyonunu tespit eder.
Yüz Tanıma Sistemi: Yüz Tanıma Sistemi, bir insanın kişisel verilerini, özelliklerini ve kimliğini doğrulamak için kullanılan teknolojidir. Yüz tanıma sistemi, dijital ortamlarda kullanılan görüntüleri ve anlık görüntüleri analiz ederek kullanıcının kimliğini ve özelliklerini tanımlayabilmektedir. Yüz tanıma sistemi, robotik kodlamada kullanılan, insanların kimliklerini ve özelliklerini tanımlayan bir yöntemdir.
Örnek olarak, bir kalabalığın içinde bulunan bir kişinin kimliğini belirlemek isteniyorsa, yüz tanıma sistemi kullanılabilir. Sistem, kalabalık içinde kişinin yüzünü tarayabilir ve eşleşen yüz özelliklerini analiz edebilir. Bu şekilde, sistem kalabalık içindeki kişinin kimliğini hedef alanın özelliklerinin kullanıcının veritabanındaki verileriyle eşleştirerek tespit edebilir.
Robotik Algılama için Filtreleme: Robotik Algılama için Filtreleme, robotik sistemlerin çevresel koşulları algılamasını sağlamak için kullanılan bir tekniktir. Bir robotik sistemin çevresini algılamasını sağlamak için, veri veya sinyallerin özelliklerine göre filtreleme uygulanır. Filtreleme, verilere göre çeşitli biçimlerde sınıflandırılarak, istenmeyen verilerin sistemden temizlenmesini sağlar.
Örnek olarak, bir robotik sistem, bir odadaki sıcaklık değerlerini algılamak için filtre uygulayabilir. Sistem, sıcaklık değerleri arasında ani veya yavaş değişimleri algılamak için filtre uygulayabilir ve odadaki diğer değerleri (basınç, nem, gürültü vs.) filtreden geçirebilir.
Robotik Algılamada Yapay Sinir Ağları: Robotik Algılamada Yapay Sinir Ağları (Robotic Sensing Artificial Neural Networks - RSANN), robotik algılama teknolojisinin temel parçası olan genel amaçlı bir sinir ağı modülüdür. RSANN'ler, çevresel verileri algılamak ve işlemek için kullanılan çok çekirdekli ilerleme algoritmalarını içerir. RSANN'ler, gerçek zamanlı veya geriye dönük değerlendirme yapmak için kullanılan özellik algılamanın yanı sıra, öğrenme kabiliyetinden de faydalanmak için tasarlanmıştır.
Örnek olarak, robotik algılamada yapay sinir ağları, robotik bir robotun çevresindeki algılamasının özelliklerini öğrenmesini sağlayarak, robotun çevresinde daha hassas hareket etmesini sağlayabilir. Bu, robotun çevresindeki çok değişkenli verileri algılamasını ve bunlara göre davranmasını sağlayacak şekilde tasarlanmış bir algoritmadır.
Robotik Mekanik Çözümleri: Robotik Mekanik Çözümler, robotik sistemlerin mekanik tasarımı ve üretiminde kullanılan çözümlerdir. Bu çözümler, robotik sistemlerin işlevsel olarak çalışma prensiplerine ve fiziksel ihtiyaçlarına göre tasarlanmış ve üretilmiş parçaların ve sistemlerin bir araya getirilmesini içerir. Akademik olarak, robotik mekanik çözümler, çoklu doğrusal veya döner eksenler veya artırılmış gerçeklik gibi farklı eksenlerin, mekanik komponentler veya mekanik çözümlerin bir araya getirilmesi ile oluşturulmuş sistemler olarak tanımlanır.
Örnek olarak, bir robotik kolun mekanik tasarımı ve üretiminde kullanılan bir robotik mekanik çözüm, bir çift döner eksen, bir çift doğrusal eksen, bir motor, bir kontrol cihazı ve bir kontrol yazılımı gibi komponentleri bir araya getirmek için tasarlanmış olabilir. Bu çözüm, robotik kolu doğrusal veya döner hareketler yapmasını sağlayacak şekilde programlanabilir.
Yapay Zeka Tabanlı Kontrol: Yapay Zeka Tabanlı Kontrol, robotik kodlama pozisyonunda, sektördeki, meslekdeki ve departmandaki çalışanlara, her türlü makine veya sistemlerin kontrolü için yapay zeka teknolojisini kullanan bir yaklaşım olarak tanımlanır. Yapay zeka tabanlı kontrol genellikle, çevre koşullarının değişmesine uyum sağlayabilen ve çevresel sinyallerden yararlanarak karar alabilen bir kontrol mekanizması olarak tanımlanır. Akademik tanım olarak, Yapay Zeka Tabanlı Kontrol, kontrol sistemlerinde, çevresel sinyallerden yararlanarak ve çevre koşullarına uyum sağlayarak karar alabilen, bilgisayar destekli bir kontrol yaklaşımıdır.
Örnek olarak, bir robotun etrafındaki çevreyi kontrol etmesi için yapay zeka tabanlı kontrol kullanılabilir. Robot, çevresinde nesnelerin varlığını algılamak için yapay zeka kullanarak, çevre koşullarına göre kendini kontrol edebilir.
Robotik Sistemler için Yeni Malzemeler: Robotik Sistemler için Yeni Malzemeler, robotik sistemlerin güvenli, işlevsel, verimli ve esnek çalışması için gerekli olan ve yeni geliştirmelere imkân tanıyan özel malzemeleri ifade eder. Bu malzemeler, kompozit, polimer, süper iletken, nanomateryal gibi yeni ve gelişmiş malzemelerden oluşur.
Örnek olarak, bir robotik sistem için bir kompozit malzeme kullanmak, robotun hareket kabiliyetini ve dayanıklılığını arttırabilir. Kompozit malzemeler aynı zamanda robotun gücünü ve hareketi arasındaki dengeyi de dengede tutmak için kullanılabilir.
Robotik Kontrol Yazılımı: Robotik Kontrol Yazılımı, bir robotik sistemin kontrol edilmesini sağlayan bir yazılımdır. Bu yazılım, robotik sistemlerin çalışması için gerekli olan komutların algılanması ve işlenmesi için gerekli olan algoritmaları içerir. Akademik tanım olarak, robotik kontrol yazılımı, bir robotik sistemin kontrol edilmesi için gereken giriş, çıkış ve kontrol modülleri arasındaki iletişimi sağlayan bir yazılım sistemidir.
Örnek olarak, bir robotik sistemde, sistemin bir parçasını hareket ettirmek için, bir komutun alınması gerekecektir. Robotik kontrol yazılımı, bu komutu algılayarak, motorun hareketini sağlayacak olan gerekli komutları üreterek, motoru hareket ettirmeyi sağlar.
Robotik Algılamada Yapay Sinir Ağı Eğitimi: Robotik Algılamada Yapay Sinir Ağı Eğitimi, robotların algılayabildiği ve öğrenebildiği çevrelerin modellenmesini sağlayan bir yöntemdir. Bu yöntem, robotun algıladığı ve öğrenmesi gereken verileri, öğrenme ve algılama modelleri için kullanılabilir hale getirerek, eğitilerek, verilerin öğrenilmesini sağlar.
Akademik tanım olarak, robotik algılamada yapay sinir ağı eğitimi, bir yapay sinir ağının düzenli olarak çalışmasını sağlamak için, öğrenme ve algılama modellerini kullanarak, verileri öğrenmesini sağlayan, temel öğrenme algoritmalarının kullanıldığı bir süreç olarak tanımlanabilir.
Örnek olarak, bir robotun çevresini algılamasını sağlayan bir yapay sinir ağı eğitimi, pozisyon ve hareketlerini algılamak için ekipmanların kullanıldığı çevresel verileri öğrenmesini sağlayacak şekilde eğitilebilir. Bu, robotların engelleri algılayarak çevrelerini gezmesini veya takip etmesini kolaylaştırır.
İnsan İzleme Sistemi: 'İnsan İzleme Sistemi', çalışanların performanslarının ve faaliyetlerinin izlenmesi amacıyla kullanılan teknolojik sistemlerin tümünü ifade eder. Buna göre, bu sistemler çalışanların hangi işleri yaptıklarını, ne kadar verimli çalıştıklarını, ne kadar sürede çalıştıklarını, ne kadar tutarlı olduklarını ve hatta hangi ürünlerin ne kadar özgün olduğunu ölçebilir.
Örnek olarak, bir şirketin üretim hatlarında çalışanların üretim hızlarını izlemek için bir İnsan İzleme Sistemi kullanabilir. Bu sistem, çalışanların üretim hatlarında ne kadar zaman geçirdiklerini, ne kadar ürünü ne kadar sürede ürettiklerini, üretim hatlarında kullandıkları malzemeleri takip edebilir. Böylelikle, hatlardaki üretim verimliliğini arttırmak için kararlar alma sürecine yardımcı olur.
Robotik Dizaynda Verimlilik: Robotik Dizayn Verimliliği, robotların efektif ve etkili şekilde kullanılması için tasarlanan ve programlanan robotik sistemlerin tasarımına ilişkin bir kavramdır. Robotik dizayn verimliliği, robotların kullanımına kolaylık sağlayacak ve verimliliği arttıracak şekilde tasarlanmasını ve programlanmasını içerir. Akademik olarak, robotik dizayn verimliliği, robotik sistemlerin tasarımına ve programlanmasına ilişkin teknolojilerin üretim, dağıtım ve kullanım alanlarını kapsayan ve robotik sistemlerin tasarımının, programlanmasının ve kullanımının verimliliğini arttırmaya yönelik çabaları içeren bir kavram olarak tanımlanır.
Örnek olarak, bir otomasyon projesinde, robotik dizayn verimliliği, robotların kullanımını maksimize etmek için tasarlanan ve programlanan robotik sistemin iş akışını, verimliliğini ve gecikme süresini azaltmaya yönelik özel çözümleri içerir.
Hareketli Robotik Sistemler: Hareketli Robotik Sistemler, robotların mekanik bir konumda hareket etmesini ve üç boyutlu yerleri doğru şekilde algılamasını sağlayan bir sistemdir. İşlemleri gerçek zamanlı olarak yürüten bu sistemler, konum ve hareket bilgisini kullanan ekstraksiyon, konumlandırma ve hareket kontrolü algoritmalarını kullanır.
Örnek olarak, bir otomatik kalıp makinesinde, bir robotun üç boyutlu kalıp parçalarını etiketlemek için kullanılan konumlandırma ve hareket kontrolü sistemleri hareketli robotik sistemler olarak bilinir. Robot, kalıp parçalarının her biri üzerindeki etiketleri tarayarak ve her parçanın konumunu doğru şekilde algılayarak, etiketleri doğru yerlere yerleştirebilir.
Robotik Kontrol Donanımları: Robotik Kontrol Donanımları, robotik uygulamalara kontrol sağlamak için kullanılan elektronik donanımlar için kullanılan bir terimdir. Bunlar, robotik sistemlerin girişlerini, çıkışlarını, kontrol görevlerini veya robotik bir cihazın hareketlerini kontrol etmek için kullanılan sistemlerdir.
Robotik Kontrol Donanımları, robotik sistemlerin kontrolünü sağlamak için kullanılan bir set elektronik donanımları içerir. Bu donanımlar, sensörler, mikroişlemciler, motorlar, yönlendiriciler ve diğer kontrol cihazlarının bir kombinasyonudur. Örneğin, bir robotik sistemin hareketini kontrol etmek için kullanılan bir mikroişlemci, bir motor ve bir sensör bir robotik kontrol donanımının bir parçası olabilir.
Robotik Algılama için Özelleştirilmiş Algoritmalar: Robotik Algılama için Özelleştirilmiş Algoritmalar, robotik kodlama pozisyonunda, mesleğinde, departmanında, sektöründe ve işinde kullanılan özel bir algoritma türüdür. Bu algoritmalar, robottaki hareket, duyum ve arka plan bilgisi üzerinde geliştirilmiştir. Bu algoritmalar, robotların çevrelerindeki nesnelerin algılanmasını ve tanınmasını sağlamak için kullanılır.
Akademik tanım olarak, robotik algılama için özelleştirilmiş algoritmalar, robotların çevrelerindeki nesnelerin konumunu ve karakteristik özelliklerini tanımlamak için tasarlanmış matematiksel modellerdir. Bu algoritmalar, robotların çevrelerindeki nesneleri algılayabilmesi için gerekli olan veri toplama, veri işleme ve veri analizi için kullanılır.
Örnek olarak, bir robot tarafından ev ortamında bir kapıyı algılamak için, bir robotik algılama için özelleştirilmiş algoritma kullanılır. Bu algoritma, robotun kapıyı algılaması için gerekli olan konum ve karakteristik özellikleri tanımlayarak, robotun kapıyı tanımasını ve çevresindeki nesneleri algılamasını sağlar.
robotik kontrol için derin öğrenme: Robotik Kontrol için Derin Öğrenme, Robotik alanında kullanılan bir makine öğrenmesi tekniğidir. Bu teknik, robotların görevlerini çözmelerini sağlamak için robotların davranışlarını belirlemek için kullanılan modelleme tekniğidir. Derin öğrenme, bilgisayarların veriyi analiz etmesini ve öğrenmesini sağlamak için kullanılan bir yöntemdir. Bu modeller, veriyi ve çevresel bilgiyi girdiler olarak alır veya çıktı olarak tahminler üretir.
Örnek olarak, insan sağlığını kontrol etmek için bir robot kullanılabilir. Sağlık verilerini girdi olarak alan derin öğrenme algoritmaları, insan sağlığının durumunu tahmin etmek için kullanılabilir. Robot, tahmin sonuçlarına göre doktor tarafından önerilen tedavi protokollerini yürütebilir.
Yeni Robotik Uygulamalar: Robotik Uygulamalar, robotik teknolojinin yeni veya mevcut robotik sistemleri tasarlamak, kurmak veya kullanmak için kullanılan yöntemleri içerir. Akademik tanım olarak, robotik uygulamalar, robotik teknolojinin mevcut sistemleri tasarlamak, kurmak veya kullanmak için kullanılan yöntemleri ifade eder. Örneğin, bir güvenlik sistemi tasarlamak, kurmak veya kullanmak için kullanılan robotik sistemleri, robotik uygulamalara dahildir.
Robotik Entegre Devreler için Tasarım: Robotik Entegre Devreler için Tasarım, robotik sistemlerin işlerini gerçekleştirmek için gerekli olan donanım ve yazılım ürünlerinin tasarımını ifade eder. Entegre devreler, elektronik devrelerin birkaç çeşit bağlantılı devreyi bir araya getirme yeteneğini ifade eder. Bunlar, robotik sistemlerin görevlerini tamamlamak için gerekli olan bilgi işleme için kullanılan çoklu devrelerdir.
Örnek olarak, robotik uygulamalarda kullanılan çoklu devrelerin bir araya getirilmesi, robotik entegre devreleri için tasarımın önemli bir parçasıdır. Örneğin, bir robotik sistem için çoklu devreler, hassas konumlama, hareket kontrolü ve hız ayarlaması gibi görevleri gerçekleştirmek için tasarlanır. Bu devrelerin kullanımı, robotik sistemin çalışmasını hızla ve doğru şekilde gerçekleştirmesini sağlar.
Yeni Nesil Robotik Sistemler: Yeni Nesil Robotik Sistemler, akıllı sistemlerin geliştirilmesine ve uygulanmasına odaklanan bir teknolojik alandır. Bu teknoloji, robotik sistemlerin tasarımı, üretimi, kurulumu, desteklenmesi ve bakımını kapsamaktadır. Yeni nesil robotik sistemler, çevresel durumları ve etkileşimlerini tespit edebilen, kendilerini kontrol edebilen ve kararlar alabilen çok katmanlı sensörler, kontrol üniteleri, hareket sistemleri ve yazılım içeren kompleks robotik sistemlerdir. Örneğin; cognex vision sistemleri, robotların kendilerini otomatik olarak ayarlamasını sağlayan kameralarla donatılmıştır. Bu robotik sistemler, üretimlerin daha hızlı, daha verimli ve daha güvenli hale getirilmesine yardımcı olur.
Robotik Ortam Tasarımı: Robotik Ortam Tasarımı, robotların çalışma alanlarında çeşitli fiziksel ve dijital parçaların bir araya gelmesi ile oluşturulan karmaşık bir ortamın tasarımını kapsar. Bu tasarımın amacı, robotların çalışma alanını daha üstün ve efektif bir hale getirmektir. Akademik tanım olarak, robotik ortam tasarımı, bir ortamda çalışan robotların nerede, nasıl ve ne şekilde hareket edecekleri, neleri işleyecekleri ve neleri algılayacakları gibi konularda tasarlanan bir ortamın tasarımı olarak tanımlanabilir.
Örnek olarak, bir otomotiv üretim tesisinde elektronik bir robot kullanıldığını varsayalım. Robotik ortam tasarımı, robotun üretim tesisindeki mekanizmaların, aletlerin, makinelerin ve diğer çevresel parçaların nasıl organize edileceğini, ne şekilde bağlanacağını ve ne şekilde programlanacağını içeren karmaşık bir tasarımı kapsamaktadır.
Veri Analizi ve Optimizasyon: Veri Analizi ve Optimizasyon, bilgisayar veya insan tarafından gerçekleştirilen, bir veri setinin çeşitli sonuçlara ulaşmak için anlamlı veri bütünlüğüne sahip olmasını sağlamak amacıyla izlenen bir yöntemdir. Veri Analizi ve Optimizasyon, veri setlerinden elde edilen sonuçların verimliliğini artırmak, özellikleri belirlemek, anomali tespit etmek veya öngörümler yapmak için kullanılan yöntemleri içerir. Akademik tanım olarak, Veri Analizi ve Optimizasyon, çeşitli veri setlerinden elde edilen verileri kullanarak, kullanıcının öngördüğü amaca ulaşmasını sağlamaya yönelik, verilerin incelenmesi, sorgulanması, özetlenmesi, modellenmesi ve olasılık analizi yöntemlerinin bütünüdür.
Örnek olarak, bir otomobil üreticisi, ürettiği arabaların daha verimli hale getirilmesi için arabaların günümüzdeki piyasa koşullarına göre optimize edilmesi gerektiğini düşünebilir. Veri Analizi ve Optimizasyon, aracın motor performansı, yakıt ekonomisi, emisyonları ve diğer özellikleri gibi verileri analiz etmek ve aracın bu verilere göre optimize edilmesini sağlamak için kullanılır.
Robotik Mekanik Hareket Sistemleri: Robotik Mekanik Hareket Sistemleri, bir robotun hareketlerini kontrol etmeye yönelik mekanik yapıların kullanılmasını ifade eder. Bu sistemler, robotun hareketlerini kontrol etmek için kullanılan mekanik parçaları, sensörleri, motorları, elektronik kontrol sistemlerini ve diğer mekanik aygıtların tasarımı, üretimi, programlanması, kalibrasyonu ve bakımı ile ilgilidir.
Akademik tanımına göre, robotik mekanik hareket sistemleri, robotların hareketlerini kontrol etmek için kullanılan mekanik parçaları, sensörleri, motorları ve elektronik kontrol sistemlerini kapsar. Bunların tasarımı, üretimi, programlanması, kalibrasyonu ve bakımı da dahil olmak üzere tüm aşamaların bir araya getirilmesi anlamına gelir.Örnek olarak, bir robotun hareket kontrolü için kullanılabilecek bir robotik mekanik hareket sistemi, robotun hareketlerini kontrol etmek için kullanılan bir motor, bir sensör, bir kontrol sistemi ve diğer mekanik parçaları içerebilir. Motor, sensör ve diğer parçalar programlanarak, robotun başka hareketler yapması sağlanabilir. Kalibrasyonu yapılmış olan sistem, robotun daha hassas hareketler yapmasını ve istenilen çıktıyı sağlamasını mümkün kılar.
Robotik Algılama için Veri Analizi: Robotik Algılama için Veri Analizi, veri analizi tekniklerini kullanarak, robotlara çevrelerindeki nesneler veya etraflarındaki diğer robotları algılamasını sağlamak için kullanılan bir stratejidir. Bu strateji, verileri yakalayan sensörleri kullanarak, robotların farklı özellikleri veya konumlarını algılayabilmesini sağlar. Örneğin, bir robotik sistem, çevresindeki nesneleri algılamak için çeşitli sensörleri kullanarak, bu nesnelerin yerlerini ve özelliklerini hızlı bir şekilde analiz edebilir. Ayrıca, robotlar arasındaki iletişim için de veri analizi kullanılabilir. Çalışmalarda, robotların konumlarını ve hızlarını belirlemek için kullanılan veri analizi teknikleri araştırılmıştır. Robotlar, kendi aralarındaki mesafeleri tespit etmek için, çevrelerindeki nesneleri algılayan sensörlerden elde ettikleri verileri analiz ederek, aralarındaki mesafeyi ölçerler.
İnsan-Makine Etkileşimi Araçları: 'İnsan-Makine Etkileşimi Araçları', insanların bir makinenin arayüzünü kullanarak doğrudan bilgi ve komutlar gönderip almasını sağlayan yazılım ve donanımların tümüdür. İnsan-makine etkileşimi araçları, iki taraf arasındaki etkileşimin daha verimli ve kolay olmasını sağlamak için kullanılan arayüz ve iletişim teknolojilerini kapsar. Akademik tanım olarak, insan-makine etkileşimi araçları, insan davranışını anlamak ve insanların makinelerle etkileşim kurabilmelerini sağlayan arayüzleri kapsamaktadır.
Örnek olarak, insan-makine etkileşimi araçları, bir kullanıcının bir ses veya dokunmatik arayüz kullanarak bir cihazla çalışmasını sağlayan ses veya dokunmatik komutlarla kontrol edebilmesini sağlar. Bir örnek olarak, bir kullanıcının bir akıllı telefon kullanarak müzik çalmayı kontrol etmek için komutlar vermesi insan-makine etkileşiminin bir örneğidir.
Yer İşaretleme Sistemleri: Yer İşaretleme Sistemleri, robotik kodlama pozisyonunda, mekanik robotların, özellikle mobil robotların konumunun herhangi bir ortamdaki hareketlerini izlemek için kullanılan bir teknolojidir. Bu teknoloji, mekansal konumu bir ölçekte belirlemek için kullanılan özel kodlama sistemlerini kullanır. Genellikle, bu ölçek analog veya dijital bir ortamda olabilir. Örneğin, mekanik robotların hareketleri GPS veya kablosuz iletişim teknolojileri gibi yer işaretleme sistemleri aracılığıyla izlenebilir. Bu sistemler, robotun konumunu otomatik olarak belirleyip, takip etmek için kullanılan kodlama ölçeği olarak kullanılır.
3D Baskı Robotları: 3D Baskı Robotları, 3 boyutlu baskı teknolojisinde kullanılan robotik sistemlerdir. 3D baskı, nesnelerin tarama, katmanlı baskı ve post-işleme işlemleri koordine ederek, üç boyutlu nesnelerin tasarım ve üretim sürecini hızlandırır. 3D baskı robotları, otomatik olarak çalışan kodlanmış robotlar olarak tanımlanabilir.
Örnek olarak, bir otomotiv firması, 3D baskı robotları kullanarak, otomobil parçalarının şekillendirilmesi ve üretim sürecini hızlandırabilir. 3D baskı robotları, bir tasarımın parçalarının kontrol edilen bir ortamda üretilmesini ve kalite standartlarına uygunluğunu sağlamasını sağlayan robotik sistemlerdir.
Robotik Algılama Uygulamaları: Robotik Algılama Uygulamaları, robotik sistemlerin çevreleri tarafından sunulan görsel, kulaklık veya mekanik algılama verilerini algılayarak, çevresel koşullara göre uygun hareketleri gerçekleştirmek için kullanılan teknikleri ifade eder. Akademik tanım olarak, Robotik Algılama Uygulamaları, robotik sistemlerin çevresel verileri algılaması ve bunların temel alınarak hareket eden uygun eylemleri gerçekleştirmesi için kullanılan teknikleri tanımlar. Örnek olarak, bir robotik sistem sürücünün çevresindeki arabaları algılayarak karşıya geçmesi için kullanılan robotik algılama uygulamalarını vermek mümkündür.
Görüntü İşleme Algoritmaları: Görüntü İşleme Algoritmaları, robotik kodlama pozisyonunda, meslekte, departmana, sektöre ve işe uygun olarak kullanılan bir terimdir. Görüntü İşleme Algoritmaları, görüntü işleme ile ilgili problemlerin çözümü için kullanılan bir dizi kurallar, yöntem ve algoritmaların bütününü ifade eder. Algoritmalar, giriş görüntüsünün işlenmesi, özellik çıkarması, özelliklerin karşılaştırılması, sınıflandırılması ve sonuç üretilmesi gibi işlemleri gerçekleştirmek için kullanılır. Örnek olarak, bir görüntü içerisindeki nesnelerin tanınması ve sınıflandırılması için kullanılan bir görüntü işleme algoritması, giriş görüntüsünün işlenmesi için kullanılan filtreleri veya görüntünün sınıflandırılması için kullanılan karar algoritmalarını içerebilir.
Endüstriyel Robotik Çözümleri: Endüstriyel robotik çözümleri, robotik teknolojilerinin üretim ortamlarında ve diğer endüstriyel uygulamalarda kullanılmasına olanak sağlayan çözümlerdir. Endüstriyel robotik çözümleri, üretim hatlarının verimliliğini artırmak için kullanılan ve kullanıcının özel ihtiyaçlarına göre özelleştirilebilen robotik teknolojileri kullanılarak oluşturulan sistemlerdir.
Örnek olarak, endüstriyel robotik çözümleri, üretim hattının hızını arttırmak için kullanılan robotların kontrolü ve çalışma algoritmalarının yönetimini içerebilir. Bu tür robotik çözümler, üretim sürecini optimize etmek için kullanılan sensörler, veri toplama ve güvenlik sistemleri, görüntü işleme ve konumlandırma algoritmaları ve kabuk tabanlı bir kontrol sistemi içerebilir.
Yapay Sinir Ağları: Yapay Sinir Ağları (YSA), bir konuşma tanıma veya çözümleme sistemi olarak tanımlanan, özel olarak tasarlanmış çok katmanlı bir veri yapısıdır. Ağlar, sinyaller aracılığıyla birbirleri arasında etkileşim kurabilecek biyolojik sinir hücrelerinden ilham alınarak tasarlanmıştır. YSA, kompleks problemleri çözmek için kullanılan bir makine öğrenme (ML) algoritmasıdır.
Örnek olarak, YSA, bir resim tanıma uygulamasında, resmi analiz edip etiketler belirlemek için kullanılabilir. Uygulama, YSA’yı kullanarak, her bir resimde ne olduğunu tanımlayacak ve bunu etiketleyecektir. YSA, önceden eğitilmiş katmanlar aracılığıyla her resmi tarayıp, her resmin içeriğini etiketleyecektir.
PID Kontrol Sistemi: PID Kontrol Sistemi (Proportional-Integral-Derivative Control System), üç bileşenli bir kontrol sistemi olarak tanımlanır. Bu sistem, bir sinyal almayan girişi izleyen bir çıkış sinyaline sahiptir. Proportional kısmı, giriş değişikliklerinin doğrudan çıkışa yansıtılmasını sağlar. Integral kısmı ise, giriş değişikliklerinin toplamının çıkışa yansıtılmasını sağlar. Derivatif bölümü ise, giriş değişikliklerinin hızının çıkışa yansıtılmasını sağlar.
Örnek olarak, bir uçak kontrol sistemi için, hava verileri alınarak kontrol sisteminin yönlendirilmesi için PID kontrol sistemi kullanılır. Proportional kısmı, uçuş sırasında mevcut hava koşullarının kontrol sisteminin çıkışına doğrudan yansıtılmasını sağlar. Integral kısmı, uçuş sırasında meydana gelen değişikliklerin toplamının kontrol sisteminin çıkışına yansıtılmasını sağlar. Derivatif kısmı ise, uçuş sırasında meydana gelen değişikliklerin hızının kontrol sisteminin çıkışına yansıtılmasını sağlar.
Sensör Entegrasyonu: Sensör Entegrasyonu, bir sistemin fiziksel dünyaya karşı etkin bir şekilde karşılık vermesini sağlayan sensörlerin bir araya getirilmesi, yönetilmesi ve kontrol edilmesidir. Sensör entegrasyonu, çevresel veriyi algılayan ve işleyen bir sistemin kontrolü için gereklidir.
Örnek olarak, bir otomobilin fren sistemi, aracın hızının güvenli bir biçimde düşürülmesini sağlayan sensörler entegrasyonuyla çalışır. Hız sensörleri, aracın hızını algılayarak, ön ve arka frenlerin ne zaman uygulanması gerektiğini kontrol eder ve fren baskısını ayarlar.
İnsan-Makine Etkileşimi: İnsan-Makine Etkileşimi (HMI), insanların makineler veya diğer bilgisayar tabanlı sistemlerle etkileşim kurmasını sağlayan arayüzler olarak tanımlanabilir. HMI, insanların makinelerle etkileşim kurmasını sağlayan kullanıcı arayüzleri, yönetim arayüzleri, hareket kontrolü, görüntü işleme ve robotik teknolojiler gibi teknolojileri kullanarak mümkün kılar. Akademik olarak, HMI, insanlarla makineler arasındaki etkileşimin etkili bir şekilde nasıl sağlanabileceğini incelemek için kullanılan bir yaklaşımdır.
Örnek olarak, bir fabrikada çalışan insanların tesisi kontrol etmek için bir kontrol paneli kullanmaları, insan-makine etkileşimine örnektir. Bu panel, insanların tesisin çalışmasını kontrol etmesini ve robotların görevlerini yerine getirmelerini sağlamak için tasarlanmıştır. Kontrol paneline erişim, insanların tesisi kontrol etmesini ve robotların görevlerini yerine getirmelerini sağlamak için kullanılan bir arayüzdür.
Rüzgarlı Robot Tasarımı: Rüzgarlı Robot Tasarımı, robotik tasarım alanında kullanılan bir terimdir. Bu terim, robotik sistemlerin rüzgarlı ortamlarda (mesela havada uçan bir araç) kullanılabilmesi için tasarlanmasını tanımlar. Bu terim, mekanik tasarım, elektronik tasarım, yazılım tasarımı ve kontrol tasarımını kapsar. Akademik tanım olarak, rüzgarlı robot tasarımı, rüzgarlı ortamlar için tasarlanan robotik sistemlerin, mekanik tasarım, elektronik tasarım, yazılım tasarımı ve kontrol tasarımının bileşenlerini içeren bir tasarımı tanımlamaktadır. Örnek olarak, havada uçan bir quadcopter tasarımı rüzgarlı robot tasarımı kapsamındadır. Quadcopter'ın mekanik tasarımı, elektronik tasarımı, yazılım tasarımı ve kontrol tasarımı bileşenleri göz önünde bulundurularak tasarlanmış olacaktır.
Adım Motorları: Adım motorları, mekanik olarak hareket eden veya hareket komutlarını elektriksel olarak kodlayan elektrik motorlarıdır. Adım motorları, hareket komutlarının verilmesi ve komutların gerçekleştirilmesi için kullanılan özel motorlardır. Bu motorlar, komutların verilmesi için elektrik sinyallerini kullanırlar ve bu sinyaller aracılığıyla hareketler gerçekleştirilir.
Örnek olarak, bir robotik el, bir adım motoru kullanarak parmaklarının hareketini kontrol edebilir. Adım motoru, robotik elin parmaklarının açılması veya kapanması gibi komutların verilmesi ve gerçekleştirilmesi için kullanılır.
Robotik Otomasyon: Robotik Otomasyon, robotların, makinelerin veya sistemlerin, programlanmış komutlarla gerçekleştirilen otomatik olarak çalışmasını sağlayan bir teknolojidir. Robotik otomasyon, mekanik ve elektronik parçaların bir araya getirilerek otomatik olarak işlem görmesini sağlayan bir teknolojidir. Robotik otomasyon, bir ürünün veya hizmetin üretiminden tedarik zincirine kadar uzanan uzun bir süreçte birçok işlemi otomatik olarak yürütmeyi sağlayan teknolojilerin bir araya getirilmesiyle oluşur.
Örnek olarak, robotik otomasyon, bir üretim sürecinde kullanılan mekanik ve elektronik parçaların, programlanmış komutlarla bir araya getirilerek otomatik olarak çalışmasını sağlayabilir. Örneğin, bir üretim sürecinde kullanılan robotlar, programlanmış komutlarla üretim sürecinin her aşamasını otomatik olarak yürüterek üretim sürecinin daha verimli hale gelmesini sağlayabilir.
Dış Ortam Algılama: 'Dış Ortam Algılama' (Environment Perception), robotik kodlama pozisyonunda, kullanılan bir terimdir. Bu terim, robotların çevrelerindeki nesnelere ve özelliklere karşı algılama yeteneğini temsil eder. Akademik olarak, dış ortam algılama, robotların çevresindeki fiziksel özellikleri, seçenekleri ve fırsatları keşfetmeyi gösterir.
Örnek olarak, bir telefon uygulamasında, kullanıcının bulunduğu mekanı algılamasını sağlamak için, telefonun dış ortam algılaması kullanılabilir. Böylece, kullanıcının telefonu kullanırken çevresinde neler olduğunu algılayabilir ve kullanıcıya özel öneriler sunabilir.
Robotik Hareket Kontrolü: Robotik Hareket Kontrolü, bir robotun görevleri gerçekleştirmek için gerekli olan hareketleri kontrol etmek için kullanılan bir tekniktir. Akademik olarak, bu terim, bir robotun, önceden tanımlanmış bir hedefe ulaşmak için verilen girdilerden veya yerleşik kontrol algoritmalarından yararlanarak hareketinin doğru şekilde gerçekleştirilmesini ifade eder. Örnek olarak, bir robotun, bir nesneyi almak ve nesneyi başka bir yere taşımak için kullanılan hareketleri kontrol etmek için kullanılan bir Robotik Hareket Kontrolü algoritmasını düşünebilirsiniz.
Robotik Algılama Verisi: Robotik Algılama Verisi, bir robot tarafından algılanan ve depolanan bilgileri ifade eder. Bu veri, robotun dünyayı algılamasını, yönlendirmesini ve davranışlarını belirlemesi için gereklidir. Akademik tanım olarak, robotik algılama verisi, bir robot tarafından algılanan ve saklanan gözlemlerden oluşan veri kümesidir.
Örnek olarak, bir robotun sokakta yürümesi sırasında kamerasıyla çektiği fotoğraflar, algılama verisi olarak sayılabilir. Robot, bu veriyi kullanarak çevresinde ne olduğunu gözlemleyebilir ve bu bilgileri kullanarak çevresinde nasıl hareket edeceğine karar verebilir.
Makine Öğrenmesi: Makine Öğrenmesi, robotik kodlama pozisyonunda, mesleğinde, departmanında, sektöründe ve işinde kullanılan bir terimdir. Makine Öğrenmesi, bir model oluşturmak için verilerin kullanılmasına dayanan ve verilerin algoritmalarla kullanılmasıyla çözüme ulaştırılmasına olanak veren bir yaklaşımdır. Akademik olarak, makine öğrenmesi, bilgisayar biliminde, verileri etkili ve otomatik olarak kullanarak, yeni durumlarda doğru tahminler yapmaya çalışan sistemlerin geliştirilmesini amaçlayan bir alandır.
Örnek olarak, bir sınıflandırma algoritması ile bir nesnenin fotoğrafındaki bir etiketin kim olduğu tahmin edilebilir. Makine öğrenmesi, bu tür problemlerin çözülmesinde kullanılan bir yöntemdir. Bir fotoğraf eğitim verileri kullanarak, doğru sınıflandırma algoritması oluşturabilir ve yeni fotoğrafların etiketlerini öğrenebilir.
Robotik Algılama Sistemleri: Robotik Algılama Sistemleri, robot teknolojisinde kullanılan sensörler, algılayıcılar, sinyal vericiler ve diğer cihazlar ile çevresel koşulları algılamak ve etkileşim kurmak için kullanılan kontrol sistemleridir. Robotik algılama sistemleri, robotların çevreyi okumasını ve ona cevap vermesini sağlayan önemli bir kısımdır. Örneğin, robotlar, kameralar, lazer tarayıcılar, görüntü işleme ve sensörler kullanarak çevrelerindeki nesneleri algılayabilir. Bu algılamalar, robotların etkileşimlerini ve hareketlerini düzenleyen kontrol sistemleri tarafından kullanılır.
Dron Kontrolü: Dron Kontrolü, robotik kodlama pozisyonunda, mesleklerinde, departmanlarında, sektörlerinde ve işlerinde kullanılan bir terimdir. Dron Kontrolü, dronların otomatik olarak kontrol edilmesi anlamına gelir. Akademik tanımı olarak, Dron Kontrolü, bir dronun kontrol edilmesi ve otomatik olarak yönetilmesi için kullanılan kodlama ve yazılım teknolojisidir. Örnek olarak, dronların çizgi veya alanlara otomatik olarak yönlendirilmesi gibi bir uygulama için dron kontrolü kullanılabilir.
Gelişmiş Malzeme Kullanımı: Gelişmiş Malzeme Kullanımı, robotik kodlama pozisyonunda ve diğer teknolojik alanlarda kullanılan bir terimdir. Bu terim, kullanılan malzemenin tasarımının daha iyi olmasının ve özelliklerinin daha etkin bir şekilde kullanılmasının sağlanmasını ifade eder. Akademik olarak, gelişmiş malzeme kullanımı, malzeme tasarımının iyileştirilmesi ve özelliklerinin daha etkin bir şekilde kullanılmasıdır. Örnek olarak, robotik kodlama pozisyonunda bir kod yazıyorsanız, kodu daha hızlı ve verimli çalıştırmak için gelişmiş malzeme kullanımını kullanabilirsiniz.
Uzaktan Algılama Teknolojisi: Uzaktan Algılama Teknolojisi, iki veya daha fazla farklı kaynaktan, çoğu zaman dijital olarak, toplanan veya elde edilen verilerin kullanılarak algılanan ve analiz edilen bilgileri ifade eder. Bu teknoloji, kameralar, radar, lazer tarayıcılar, sıcaklık sensörleri, görüntü yükselticiler, mikrodalga ve infraruj cihazları gibi sensörlerin kullanılmasını gerektirir. Akademik tanım olarak, Uzaktan Algılama Teknolojisi, iki veya daha fazla farklı kaynaktan elde edilen verilerin kullanılarak algılanan ve analiz edilen bilgileri ifade eder.
Örnek olarak, Uzaktan Algılama Teknolojisi, bir takım çalışmalarda kullanılan bir dijital fotoğraf makinesinin bir kameralı robot tarafından kullanılmasıyla gerçekleştirilebilir. Robot, kameralarını kullanarak çevredeki çeşitli nesneleri algıladığı ve bunların nerede durduklarını veya nerede hareket ettiklerini anlayarak algılar. Robot, bu bilgileri kullanarak çevredeki nesneleri takip etmesini, dolaşmasını veya geri dönmesini sağlayacak bir yol haritası oluşturur.
Yapay Zeka: Yapay Zeka (YZ), insanların yerine makinelerin kendi kendini programlayarak çözmeye çalıştığı problemleri çözmek için kullanılan bir kavramdır. Akademik olarak, YZ, makinelerin insanlardan daha fazla öğrenme ve düşünme yeteneğine sahip olmasını sağlamak için kullanılan bir kavramdır. Örnek olarak, YZ, otomatik sürüş sistemlerinde kullanılan sensörlerin deneysel verilerini toplayarak trafik kurallarına ve çevre koşullarına uygun bir şekilde aracı kontrol etmesini sağlayabilir. Bu, aracın kullanıcının kontrol etmesini gerektirmeksizin kendi başına hareket etmesini ve çevre koşullarındaki değişikliklere kolayca adapte olmasını sağlar.
Robotik Mühendislik: Robotik Mühendislik, malzeme ve hareketin kontrolünü sağlamak için tasarlanan elektronik ve mekanik sistemlerin tasarımı, üretimi ve kontrolünü içeren bir tür mühendisliktir. Bu alanda çalışanlar, robotların programlanmasını, çalışma prensiplerini ve işlevlerini geliştirmek için tasarlanan algoritmaları ayrıştırırlar. Robotik Mühendislik aynı zamanda robotların çevreleriyle etkileşimini sağlamak için gereken gözlem, tasarım ve kontrol tekniklerinin geliştirilmesini de içerir.
Örnek olarak, bir robotik mühendis aracın bir alanı tarayıp alanın özelliklerini ve koordinatlarını belirlemek için kendi kendini programlayarak komutlar geliştirebilir. Bunun yanı sıra, aracın kontrolünü sağlamak için sensörler kullanarak, algoritmaların doğru çalışmasını sağlayabilir.
Kontrol Algoritmaları: Kontrol algoritmaları, mekanik sistemlerin, fiziksel ilkelere, özellikle de doğrusal cebir ilkelerine dayanarak modellenmesi ve daha sonra bu sistemin çalışmasının kontrol edilmesi için kullanılan algoritmalardır. Akademik olarak, kontrol algoritmaları doğrusal ve lineer olmayan sistemlerin modellenmesi ve kontrol edilmesi için kullanılan matematiksel modeller, yöntemler ve algoritmalardır.
Örnek olarak, bir robot tarafından yapılan bir işlemi kontrol etmek için, bir kontrol algoritması kullanabiliriz. Algoritma, robotun verilen sinyalleri almasına, bunları işlemesine ve daha sonra belirli bir görevi yerine getirmesine izin verecek bir kod dizisi kullanılarak robotun görevini kontrol eder.
Kablosuz Kontrol Sistemi: Kablosuz Kontrol Sistemi, robotik ve otomasyon sektöründeki kontrol sistemlerinde kullanılan bir terimdir. Bu sistem, kablosuz ağlar kullanarak farklı cihazlar arasındaki veri ve komut alışverişini sağlamak için kullanılan bir kontrol sistemidir. Akademik tanım olarak, kablosuz kontrol sistemi, kablosuz veri ağlarını kullanarak bir cihazdan diğerine kablo olmadan sürekli kontrol ve bilgi alışverişi sağlayan bir kontrol sistemidir.
Örnek olarak, bir robotik kolun kontrolü için kablosuz kontrol sistemi kullanılabilir. Robotik kolun her hareketi, kablosuz olarak bir kontrol cihazından diğerine aktarılabilir. Bu, robotik kolun daha hızlı ve kolay kontrol edilmesini sağlar.
Endüstriyel Robot Programlama: Endüstriyel Robot Programlama, robotların programlanması için robotlar ve robot sistemleri arasındaki etkileşimin temelini oluşturan bir yöntemdir. Bu yöntem, robotların çeşitli görevleri gerçekleştirmelerine olanak sağlayan programların yazılmasını içerir. Endüstriyel robot programlama, robotların üretim süreçleri için tasarlanmış, kontrol edilmiş ve yönetilen komutları kullanarak programlanmasını içerir.
Örnek olarak, bir endüstriyel robotun bir takım parçaları kaldırıp bir konveyöre taşıması gerekebilir. Bu görevi yerine getirmek için robotun her adımını programlamak gerekecektir. Program, robot kolunun nerede duracağını, ne kadar hızlı hareket edeceğini, ne seviyede yükleneceğini ve parçaların nereye taşınacağını belirlemelidir.
Sanal Gerçeklik Uygulamaları: Sanal gerçeklik uygulamaları, çevrimiçi etkinlikler ve oyunlar için tasarlanmış sanal gerçeklik platformlarının kullanımını ifade eder. Sanal gerçeklik, gerçekliğin bir çeşit modifiye edilmiş versiyonu olarak tanımlanır ve çoğunlukla dijital bir ortamda tasarlanır. Sanal gerçeklik uygulamaları, sanal gerçeklik teknolojisi kullanılarak oluşturulmuş oyunlar, içerikler ve etkinlikleri kapsar.
Örnek olarak, sanal gerçeklik uygulamaları, bir konferans veya etkinliğin sanal bir ortamda düzenlenmesini sağlayan bir platformu içerebilir. Bu platform, katılımcıların gerçek bir ortamda olmadıklarından, fiziksel bazı kısıtlamalar olmaksızın, etkinliğe tam olarak katılmalarını sağlayacak şekilde tasarlandı.
Robotik Mekanik Sistemler: Robotik Mekanik Sistemler, robotik kodlama pozisyonunda, mesleğinde, departmanında, sektöründe ve işinde kullanılan, robotik sistemlerin mekanik parçalarının tasarımı, kontrolü ve üretimine odaklanan bir kavramdır. Akademik tanım olarak, Robotik Mekanik Sistemler, makine parçalarının kullanımı, birleştirilmesi, tasarlanması ve kontrolü gibi işlemleri içerebilen mekanik sistemler olarak tanımlanır. Özellikle, robotik sistemlerin mekanik parçalarının tasarımı, üretimi ve kontrolü için kullanılır.
Örnek olarak, bir robotik sistemin mekanik parçalarının tasarımıyla işlem yapılabilir. Robotik sistemde, motorlar, kontrol elemanları, kablolar, sensörler ve diğer parçalar kullanılarak mekanik sistem tasarlanabilir. Bu parçalar bir araya getirildiğinde, robotik sistem mekanik olarak hareket edebilir.
Sensör Veri İşleme: Sensör Veri İşleme, sensörler tarafından toplanan verileri analiz etmek ve işlemek için kullanılan bir yaklaşımdır. Sensörler tarafından toplanan veriler robotik, mekatronik, bilişim ve mikroişlemciler gibi çeşitli alanlarda kullanılır. İşlem, sensörler tarafından toplanan verilerin çözümlenmesi, düzenlenmesi ve özetlenmesiyle başlar. Ardından, verilerin çözümünün nihai hedefe ulaşması için kullanılan algoritmalar uygulanır.
Örnek olarak, bir robotik sistemde, bir kameradan toplanan görüntü verilerinin nesne tanıma için işlenmesi örnek olarak verilebilir. Görüntü verileri, algoritmalar aracılığıyla işlenir ve örnek olarak, nesnelerin pozisyonu, türü ve özellikleri tespit edilir. Sonuç olarak, robotik sistem, görüntü verilerinin işlenmesi aracılığıyla görevini daha doğru ve verimli bir şekilde gerçekleştirecektir.
Robotik Konveyör Sistemleri: Robotik Konveyör Sistemleri, robotik kodlama mesleğinde, otomasyon ve verimlilik için kullanılan bir sistemdir. Robotik konveyör sistemleri, işlemlerin veya ürünlerin konveyör bantları, konveyör merdivenleri veya diğer mekanik sistemler aracılığıyla akışkan bir şekilde taşınmasını sağlayan otomatik sistemler olarak tanımlanır. Bu sistemlerin temel amacı, üretim süreçlerindeki işlemleri veya ürünlerin taşınmasını otomatik olarak hızlandırmak ve daha verimli hale getirmektir.
Örnek olarak, robotik konveyör sistemleri, bir fabrikada üretilen ürünlerin daha hızlı ve daha güvenli bir şekilde taşınmasını sağlayabilir. Bu sistemler, üretim süreçlerinin verimliliğini ve güvenliğini artırmak için kullanılabilir. Robotik konveyör sistemleri, ürünlerin otomatik olarak hareket ettirilmesi ve istenen konuma taşınması gibi sayısız avantaj sunar.
Robotik Kontrol Mimarisi: Robotik Kontrol Mimarisi, bir robot sisteminin tasarım, programlama veya kontrol sürecini kontrol etmek için kullanılan bir yapıdır. Mimaride, tüm sistem bileşenleri arasındaki ilişkiler, kaynaklar ve sistemin davranışı üzerinde etkili olduğu için, arka plan işlemleri arasındaki ilişkilerin düzenlenmesi ve imalat süreçleri arasındaki armoninin sağlanması önemlidir.
Örnek olarak, bir robotik sisteminde, kullanıcıdan alınan komutların robot tarafından doğru yönde yürütülmesini sağlamak için, robot tarafından algılanan mesajların kontrol sisteminin kullanıcı tarafına iletilmesi gerekir. Bu süreçte, robotik kontrol mimarisi, bu iletişim ağının tasarım ve kontrol sürecinin nasıl çalışacağını belirlemek için kullanılır.
Robotik Algılamada Derin Öğrenme: Robotik Algılamada Derin Öğrenme, robotik algılama ve kontrolde kullanılan öğrenme yaklaşımlarının bütününü tanımlayan temel bir terimdir. Akademik olarak, Derin Öğrenme, bilgisayarların doğal dil algılaması, konuşma tanıma ve bilinçli modeller oluşturma gibi karmaşık görevleri yerine getirmek için çok katmanlı sinir ağlarını kullanmasını gerektiren öğrenme algoritmalarının türüdür. Derin Öğrenme, robotik algılama süreçlerinde, robotların mevcut çevrelerini veya çevreler üzerinde etkileşimde bulundukları sistemleri algılamalarını sağlamak için kullanılır.
Örnek olarak, bir robotun bir kapıyı algılamasını sağlamak için Derin Öğrenme kullanılabilir. Robot, çeşitli kameralar, sensörler veya diğer algılama cihazları aracılığıyla çevresindeki her nesneyi tarar ve öğrenme algoritmalarını kullanarak kapıyı tanımlamaya çalışır. Derin Öğrenme algoritmaları bu tür arka plan görüntülerinin filtrelenmesinde ve bir kapının özelliklerinin tanımlanmasında kullanılabilir.
Geliştirilmiş Görüntü İşleme: Geliştirilmiş Görüntü İşleme (GGİ), bilgisayar destekli bir tekniktir ve görüntüleri işlemek, düzenlemek ve özelleştirmek için kullanılır. GGİ, görüntüleri işlemek için çeşitli algoritmalar ve yöntemleri kullanır. Görüntüler çoğunlukla farklı formatlarda veya çözünürlüklerde alınır ve geliştirilmiş görüntü işleme teknikleriyle işlenir.
Örnek olarak, bir insan yüzünü tarama için bir görüntü alınır ve GGİ kullanılarak, yüze ait özelliklerin tespiti için algoritmalar uygulanır. Görüntü işleme teknikleri, yüzün hangi özelliklerinin tespit edilebileceğine veya tahmin edilebileceğine bağlı olarak değişir.
Kontrol Teorisi: Kontrol Teorisi, bir sistemin çıkışını verilen bir girdiye veya sistemin davranışındaki değişikliklere göre optimum olarak ayarlayan sistemlerin tasarımı ve analizi için bir kavramdır. Akademik tanım olarak, Kontrol Teorisi, bir sistemin çıkış değerini belirli bir girdiye göre ayarlamanın bilimsel bir yaklaşımıdır.
Bir örnekle açıklamak gerekirse; bir robot kolunun bir nesneyi yakalamak için verilen komutlara cevap vermesi durumunda, Kontrol Teorisi kullanılır. Robot kolun nesneyi yakalayabilmesi için, hareketlerinin doğru şekilde ayarlanması gerekir ve bu ayarlamayı sağlamak için Kontrol Teorisi kullanılır. Kontrol Teorisi, robot kolunun komutlara verdiği cevabın optimum olarak ayarlanmasını sağlar.
Robotik Öğrenme: Robotik Öğrenme, robotların, verilen görevleri çözmek için kendiliğinden öğrenme kabiliyetini geliştirmesini sağlamaya yönelik bir alandır. Bu alanda, robotların, çevrelerindeki davranışları izleyerek, öğrenme yeteneğini artırmak ve en uygun çözümleri ortaya çıkarmak için algoritmalar kullanılır. Akademik olarak, Robotik Öğrenme, bir robotun çevresindeki davranışlarını izleyerek ve çevresiyle etkileşim kurarak kendini optimize etmeyi amaçlayan bir alandır.
Örnek olarak, bir robot araba, trafiğin yoğunluğunu ve diğer araçların hareketlerini izleyebilir ve bu hareketleri öğrenebilir. Böylece, robot araba, trafikteki diğer araçlarla etkileşim kurarak en uygun rotaları tahmin edebilir ve en kısa sürede hedefine ulaşabilir.
Mikro Denetleyiciler: Mikro Denetleyiciler, mikroişlemci tabanlı denetleyicilerdir. Bir mikro denetleyici, mikroişlemci, bellek, giriş / çıkış ve diğer donanım parçalarının tümünü barındıran bir entegre devredir. Bu entegre devre, bir üst düzey programlama diliyle programlanan veya donanım yoluyla programlanan işlemleri gerçekleştirebilir.
Örnek olarak, bir tesis otomasyon sistemi, mikro denetleyiciler kullanarak çalışan bir lazer kesme sistemi için programlanabilir. Mikro denetleyici, lazer kesme komutlarını alacak ve bu komutları sistem tarafından istenen kesim algoritmalarına göre çalışacak şekilde gerçekleştirecektir.
Robotik Çerçeve Tasarımı: Robotik Çerçeve Tasarımı, robotik uygulamalar için kullanılan donanım veya yazılıma dayalı çerçeve tasarımı anlamına gelir. Bu tasarım, bir robotun görünümünü, hareketlerini ve çevresiyle etkileşimini sağlamak için gerekli donanım veya yazılımların bir araya getirilmesi olarak tanımlanır.
Örnek olarak, bir robotik araba oluşturmak için, arabanın üzerinde ve içinde bulunacak donanım ve yazılımların bir araya getirilmesi gerekir. Bu donanım ve yazılımlar arasındaki etkileşimin çalışmasını sağlamak için Robotik Çerçeve Tasarımı kullanılır. Donanım, araba hareketlerini kontrol etmek için gereken motorlar, sensörler veya bağlantıları içerirken, yazılım arabanın hareketlerini kontrol etmek için gerekli bilgiyi içerir.
Robotik Kavrama Sistemi: Robotik Kavrama Sistemi, bir robot tarafından algılanan çevresel bilgileri işleyebilmek ve uygun eylemleri seçebilmek için kullanılan bir sistemdir. Bu sistem, robotlara çevresel bilgileri tanımak, kavramak ve bu bilgileri sınıflandırarak işlemelerini sağlayan bir algoritma oluşturmak için kullanılır. Örneğin, robotik bir sistem, bir araca binmek için daha yakın olan noktaya ulaşmak için çevresindeki nesneleri algılayabilir, bunların pozisyonlarını ve özelliklerini kavrayabilir ve bu verileri kullanarak en uygun hareketi seçebilir.
Simülasyon Yazılımı: Simülasyon Yazılımı, robotik kodlama pozisyonunda, mesleğinde, departmanında, sektöründe ve işinde kullanılan bir terimdir. Simülasyon, bilgisayar üzerindeki etkileşimli bir ortamda gerçek dünyadaki bir sistemin çalışmasını tahmin etmek için kullanılan modellemelerin çalışması anlamına gelir. Akademik tanım, simülasyonun, bir sistemin veya sürecin, her bir olayın veya eylemin, zaman içindeki değişimlerinin ve etkileşimlerinin, bir bilgisayar programı kullanılarak öngörülmesini içerir. Örnek olarak, robotik kodlama pozisyonunda, simülasyon yazılımının kullanılması, robotik sisteminin bir ortamda nasıl çalışacağını öngörmek için kullanılabilir. Simülasyon yazılımı, kontrol sistemi tasarımı, işletim ve yürütülen görevler dahil olmak üzere, bir robotik sisteminin performansı hakkında öngörüler sağlayabilir.
Robotik Entegre Devreler: Robotik Entegre Devreler, robotik sistemlerin çalışmasını kontrol etmek için tasarlanan mikroişlemci tabanlı entegre devrelerdir. Bu devreler, robotik sistemlerin mekanik, elektriksel ve yazılımsal kısımlarını bir araya getirerek, sistemlerin zamanında ve doğru bir şekilde işlem yapmasını sağlar.
Örnek olarak, bir robot aracın arabanın arka taraftaki tekerlekleri kontrol etmek için kullanılan bir robotik entegre devre, bir mikroişlemci, bir kontrol kartı, bir güç kaynağı ve birkaç akım sensöründen oluşur. İşlemci, sensörlerden gelen bilgiyi alır ve kontrol kartına gönderir. Kontrol kartı, araca verilen komutları alır ve aracın hareketlerini kontrol eder. Güç kaynağı, kontrol kartını ve diğer elektronik kısımların çalışmasını sağlar.
Robotik Hareket Planlama: Robotik Hareket Planlama, robotik alanda yürütülen bir proses olarak tanımlanır. Temel olarak, robotik sistemlerin, robotik cihazların, robotik aracın veya robotik ekipmanın, düşünülen görevleri başarıyla tamamlaması için gereken hareketleri sağlamak için gerekli olan önemli bir adımdır. Akademik olarak, Robotik Hareket Planlaması, bir robotik sistemin ulaşmak istediği bir hedefe ulaşmak için gerekli olan hareketleri ve planları belirlemeyi kapsamaktadır. Hareket planlaması, çözüm için gerekli olan koordinatları, hareketleri, hızları veya algoritmaları belirlemekten ve hesaplamaktan ibarettir.
Örnek olarak, robot bir kutu taşıma görevinde, Robotik Hareket Planlaması kullanılarak, robotun kutu taşımak için gerekli olan hareketleri, yönleri, hızları ve koordinatları belirlemek için kullanılabilir. Bu, robotun kutuyu nereden alacağından, nereye taşıyacağına kadar her aşamayı kontrol etmesine izin verir.
Robotik Ortam Modelleme: Robotik Ortam Modelleme, bir robot tarafından izlenecek olan bir ortamın matematiksel olarak modellenmesidir. Robotik Ortam Modelleme, robotun komut verilen çevresel koşullara göre hareket etmesini sağlamak için kullanılan bir tekniktir. Bu teknik, robotun izlenecek yolu, tespit edilen çevresel faktörleri veya diğer robotların varlığını içermektedir. Akademik tanım olarak, Robotik Ortam Modelleme, bir ortamda mevcut olan çevresel ve mekanik koşulların konum, hareket ve çevresel faktörlerin modellenmesini sağlayan bir teknik olarak tanımlanabilir.
Örnek olarak, bir robotun bir binadan çıkmasını simüle etmek için Robotik Ortam Modelleme kullanılabilir. Robotun komutları, binanın girişindeki çıkış kapısına giderek başlayacak ve binanın içindeki tüm mekanik aksamların ve çevresel unsurların modeli oluşturulacaktır. Robotun binadan çıkışının nasıl gerçekleşeceği bu model üzerinden tahmin edilecektir.
Robotik Algılama İşleme: Robotik Algılama İşleme, robotların çevrelerindeki nesnelerin algılama ve konumlandırma bilgilerini işlemelerini sağlayan bir kavram olarak tanımlanabilir. Bu tür işlemler, nesnelerin nerede olduğunu, ne tür bir nesne olduğunu, hangi özellikleri taşıdığını ve hangi görevleri yapmaları gerektiğini tanımlamak için kullanılır.
Robotik Algılama İşleme, kameraların veya sensörlerin kullanımının yanı sıra, veri madenciliğinden yararlanarak robotların çevrelerini algılamalarını sağlayan bir algoritma olarak tanımlanabilir. Örneğin, bir robot, bir nesnenin ne olduğunu, nereye baktığını ve hangi hareketleri yaptığını saptamak için elde edilen görüntü verilerini kullanarak algılama işlemi yapabilir.
Endüstriyel Kontrol: Endüstriyel Kontrol, sürecin kontrol edilmesi veya denetlenmesini sağlayan bir yönetim sürecidir. Endüstriyel Kontrol, üretim, taşıma, depolama ve hizmetlerin kontrol edilmesi için kullanılan çeşitli teknolojileri, araçları ve yöntemleri kapsar. Akademik tanım olarak, Endüstriyel Kontrol; üretim süreçlerinin kontrolü ve/veya denetlenmesi için kullanılan yöntemler, teknolojiler ve araçlar aracılığıyla gerçekleştirilen üretim sürecinin planlanması, kontrolü ve denetlenmesidir.
Örnek olarak, Endüstriyel Kontrol için, üretim alanına kurulan bir sensör sistemi örnek verebiliriz. Sensörler, üretim sürecinde bir arıza olup olmadığını algılamak ve üretim hatalarını tespit etmek için kullanılır. Bir arıza algılandığında, sensör sisteminden veri toplanır ve arızanın kaynağının tespiti için kullanılır.
Otonom Uçuş: Otonom Uçuş, Robotik Kodlama pozisyonunda, mesleğinde, departmanında, sektöründe ve işinde kullanılan bir terimdir. Otonom Uçuş, bir uçuş aracının kendiliğinden (otomatik olarak) havada yönlendirilmesini veya kontrol edilmesini sağlamaya yönelik bir süreçtir. Akademik tanım olarak, otonom uçuş, bir uçuş aracının, kendiliğinden havada yönlendirilmesini veya kontrol edilmesini sağlamak amacıyla kullanılan bir teknoloji olarak tanımlanır.
Örnek olarak, insansız hava aracı (UAV) veya insansız uçan araçlar (UAV) gibi teknolojiler, otonom uçuş özelliklerine sahip olabilir. Bu teknolojiler, belirli konum ve yol boyunca havadaki otonom uçuş moduna geçebilir ve konumunu güncel tutabilir. Kullanıcılar, bu teknolojileri kontrol etmek için bir kontrol cihazı kullanabilir veya aracın arka ucunda bir kamera veya sensörler gibi donanımlar da kullanabilir.
Robotik Kontrol Gereçleri: Robotik Kontrol Gereçleri, bir robotun belirli bir hedefe ulaşmak için kullanılan fiziksel veya yazılım aracılarının tümüdür. Bu araçlar, robotların doğru şekilde çalışmasını sağlamak için kullanılan sensörler, motorlar, kontrol üniteleri ve diğer yardımcı cihazları içerir. Akademik olarak, robotik kontrol gereçleri, bir robotun hareket veya eylemlerini kontrol etmek için kullanılan fiziksel veya yazılım aracılarının tümü olarak tanımlanır.
Örnek olarak, bir robotun hareketi bir servo motorla kontrol edilebilir. Servo motor, bir robotun dönüşünü kontrol etmek veya dört köşe üzerinde manevraları kontrol etmek için kullanılan bir alet veya sensördür. Bir servo motor, bir robot kontrol ünitesi tarafından kontrol edildiğinde, robotun belirli bir hedefe ulaşmasını sağlayabilir.
Robotik Etkileşim Tasarımı: Robotik Etkileşim Tasarımı, robotların insanlarla etkileşim kurmalarına izin veren ve iki taraf arasındaki etkileşimin verimli bir şekilde gerçekleşmesine olanak veren bir robotik tasarım yaklaşımıdır. Bu yaklaşım, robotların güvenilir, kullanımı kolay ve etkili bir şekilde tasarlanmasını gerektirir. Akademik tanım olarak, bu yaklaşım, insan-robot etkileşiminin davranışsal, biyolojik, mekanik veya sosyal etkileşimlerden oluşan bir sistem olarak tasarlanmasını ve insanların bu sistemlerle harika bir şekilde etkileşim kurmalarını sağlar.
Örnek olarak, robotik etkileşim tasarımı, bir ev aletinin kullanımı için kullanılabilir. Örneğin, bir robotik ev aleti, kullanıcının isteklerini algılamak için kullanıcı arayüzünde bir dizi dokunmatik veya sesli komut kullanarak etkileşim kurabilir. Kullanıcı komutlarını algılayan robot, daha sonra bu komutları gerçekleştirmek için gerekli işlemleri uygulayacak ve isteği gerçekleştirmek için çalışacaktır.
Çoklu Robot Sistemleri: Çoklu Robot Sistemleri, robotik uygulamalar için birden fazla robotun oluşturduğu bir sistemdir. Birden fazla robotun aynı anda aynı amaca yönelik hareket ettikleri ve birbirleriyle etkileşimde oldukları sistemler olarak tanımlanabilirler. Akademik olarak, çoklu robot sistemleri, bir arada çalışan birden fazla robotun tasarlanması, programlanması, çalıştırılması ve koordinasyonu gereken sistemlerdir.
Örnek olarak, bir çift robotun, bir iş yerinde üretim sürecini otomatikleştirmek için kullanıldığını düşünebiliriz. Bu sistemde, iki robot arasında bir koordinasyon olacaktır. İlk robot, üretim sürecinde gereken parçaları alıp, ikinci robotun çalışması için ona iletmesi gerekecektir. İkinci robot ise, alınan parçaların işlenmesi ve üretim sürecine devam edilmesi için bir araya getirilmesi gereken parçaları bir araya getirecektir.
İnsansız Hava Araçları: İnsansız Hava Araçları (UAV), kontrol edilebilen veya hareket edebilen uzaktan kumandalı uçan taşıtlar olarak tanımlanabilir. UAV'ler, genellikle havadan, uzaktan veya otomatik olarak kontrol edilen araçlardır. UAV'ler, uzaktan kumandalı uçan taşıtların kullanımının yaygınlaşmasından beri, çok çeşitli alanlarda kullanılmaktadır. Örneğin, hava fotoğrafçılığı, hava gözetimi, seyir ve izleme, hava veri toplama ve çok amaçlı uçuşlar için kullanılabilir. UAV'ler, ayrıca, kamu güvenliği, ticari uçuşlar ve hatta evden çalışmaya yardımcı olabilecek ticari uygulamalar için de kullanılabilir.
Robotik Düzeltme Yöntemleri: Robotik Düzeltme Yöntemleri, robotların görevlerini tamamlamak için kullanılan, kodlamaya dayalı algoritmalarla donatılmış, kod geliştirme ve veri analizi araçlarıdır. Akademik olarak, robotik düzeltme yöntemleri, robotların görevlerini tamamlamak veya önceki görevlerinin sonuçlarını düzeltmek için kullanılan, eksik veya yanlış yöntemleri gidermeyi amaçlayan, kod ve veri analizi araçlarıdır.
Örnek olarak, bir robotik sistemde kullanılan bir kod, kodun çalışmasının belirli bir sonucu vermediği zaman, robotik düzeltme yöntemleri, bu kodu değiştirerek daha iyi bir sonucu üretmeyi amaçlar. Bunu yaparken, kodu yeniden yazmak ya da mevcut kodu düzenlemek gibi farklı yöntemleri kullanır.
Hareket Planlama Algoritmaları: Hareket Planlama Algoritmaları, robotik kodlama veya otomasyon uygulamalarında kullanılan bir yöntemdir. Bir robotun, öngörülen bir amaca ulaşmak için, bir takım kısıtlamalar içerisinde, en iyi hareketi seçmesini sağlamak için kullanılan bir algoritmadır. Akademik olarak, hareket planlama algoritmaları, robotik sistemlerde önceden belirlenmiş bir hedefe ulaşmak için gerekli adımların veya hareketlerin seçilmesini sağlayan bir tür arama algoritmasıdır.
Örnek olarak, bir robotun bir mekanik parçanın pozisyonunu ayarlaması gibi bir görevinde hareket planlama algoritmasını kullanmak mümkündür. Bu durumda, algoritma, robotun belirli bir hedefe ulaşmak için gerekli hareketleri seçmesi için kullanılır. Örneğin, robotun parçayı doğru pozisyona getirmesi için gerekli hareket veya adımların seçilmesi gibi.
Yerleşik Sistemler: Yerleşik sistemler, genellikle bir donanım veya donanımlar dizisi üzerinde yazılım tarafından çalıştırılan cihazlardır. Bir nesneye bağlı olarak, yerleşik sistemler herhangi bir işi otomatik olarak gerçekleştirebilir veya bir iş akışının bir parçası olarak görevleri gerçekleştirebilir. Akademik olarak, yerleşik sistemler, bir donanım veya donanımlar dizisi üzerinde yazılım tarafından çalıştırılan cihazları tanımlar. Bir örnek vermek gerekirse, bir robotik sistemde, bir kolun konumunu kontrol etmek için bir yerleşik sistem kullanılabilir. Bu sistem, bir donanım platformu üzerinde çalışan bir yazılım tarafından kontrol edilebilir ve kolun konumunu düzenli olarak izleyebilir.
Robotik Hata Ayıklama: Robotik Hata Ayıklama, robotik sistemlerin çalışma performansının ölçülmesi ve işleri doğru bir şekilde yerine getirme güvenilirliğini arttırmak için yapılan bir süreçtir. Akademik tanım olarak, robotik hata ayıklama, robotik sistemlerin görevleri doğru bir şekilde yerine getirmelerini ve yüksek verimlilik göstermelerini sağlayan bir yazılım ve donanım aracı olarak tanımlanmaktadır.
Örnek olarak, bir robotik sistem kullanılıyor olabilir ve bu sistem, görevleri otomatik olarak yerine getirmek için kodlanmıştır. Ancak, robotik sistemlerin her zaman doğru bir şekilde çalışmayabileceği için, kodunun hata ayıklamasının yapılması gerekir. Robotik hata ayıklama, bir robotik sistemin görevlerini öncelikle yerine getirmesi için gerekli olan kodu incelemek ve güncellemek için kullanılan bir süreçtir.
Robotik Konveyör Bantları: Robotik Konveyör Bantları, robotların yardımıyla çalışan, üretim süreçlerinde kullanılan bir mekanik sistemlerdir. Bir robotik konveyör bantı, ürünlerin veya parçaların bir noktadan diğerine hareket etmesini sağlayan, mekanik bir sistemdir. Sistem, motorlu bir römork veya kayış balataları yardımıyla çalışır ve ürünleri ve parçaları tamamlanmış ürünlerin üretim sürecinde hareket ettirir.
Örnek olarak, bir otomotiv üretim tesisinde, üretim hattında kullanılan robotik konveyör bantları, ürünlerin ya da parçaların her bir istasyondan diğerine hareket etmesini sağlayabilir. Bu, ürünlerin veya parçaların üretim sürecinde kaybolmasını veya zaman kaybını önlemek için kullanılabilir.
Robotik Kontrol Sistemleri: Robotik Kontrol Sistemleri, robotikte mekanik sistemlerin hareketini kontrol etmek için kullanılan özel bir tür yazılım ve donanım sistemleridir. Robotik Kontrol Sistemleri, kompleks mekanik sistemlerin hareketi ve çalışma şeklini kontrol etmek için kullanılan bir kontrol sistemi olarak tanımlanabilir.
Robotik Kontrol Sistemleri, mekanik sistemlerin çalışması için gerekli olan komutları vermek, kontrol etmek, güncellemek ve ayarlamak için kullanılan çeşitli teknolojileri bir araya getiren sistemlerdir. Kontrol sistemi, mekanik sistemlerin ayarlaması ve kontrol edilmesi için kullanılan komutların çevrimiçi olarak verilmesini sağlar. Kontrol sistemi, mekanik sistemlerin ayarlanmasını, kontrol edilmesini ve kullanımını optimize edebilir ve robotların zamanla eğitilmesini sağlayabilir.
Örnek: Robotik Kontrol Sistemleri, bir robotun kolunu hareket ettirmek için kullanılan bir sistemdir. Sistem, robotik kolu hareket ettirmek için veri toplar, kontrol eder ve kolların güncellenmesini sağlar. Kontrol sistemi ayrıca, robotik kolların hareketinin sıkı kontrol edilmesine ve optimize edilmesine olanak tanır.
Robotik Algılama ve Takip: Robotik Algılama ve Takip, robotların çevresindeki nesneleri algılayıp takip etmesini sağlayan bir teknolojidir. Robotlar, algılama ve takip teknolojisi kullanarak, belirli nesneleri algılayarak, onların yönünü takip etmeye veya kontrol etmeye çalışırlar. Akademik tanım olarak, Robotic Perception and Tracking teknolojisi, robotların çevresindeki nesneleri algılamaları, konumlarını belirlemeleri ve hareketlerini takip etmeleri için kullanılan kameralar, sensörler, kablosuz haberleşme ve diğer algılama teknolojilerinin bir kombinasyonudur. Örnek olarak, bir robot, algılama ve takip teknolojisi kullanarak, bir kenara park eden bir araba araması yapabilir ve arabanın yönünü takip edebilir.
Paralel Robotik Çözümleri: Paralel Robotik Çözümleri, bilgisayar destekli robotların kontrolü sırasında kullanılan bir yaklaşım olarak tanımlanır. Bu yaklaşım, robotlardaki hareketlerin koordinasyonunu ve görevlerini doğru bir şekilde yerine getirmesini sağlayan teknolojileri kullanarak çalışır. Bilgisayar destekli robotların hareketleri, çoklu görevleri yerine getirebilir ve farklı bağlamlarda kullanılabilir.
Örnek olarak, paralel robotik bir sistem, otomatik bir fabrikada kullanılabilir. Sistem, robotların yükleri alıp yerleştirmesini, ürünleri paketlemesini ve çeşitli işlemleri yerine getirmesini sağlar. Robotlar, görevlerin doğru şekilde yerine getirilmesi için programlanmış bilgisayar kontrolünü kullanır.
Öğrenme Kontrolü: 'Öğrenme Kontrolü' terimi, robotik kodlama pozisyonunda kullanılan ve robot kontrolündeki makine öğrenmesi teknolojileri ile ilgili olan bir terimdir. Bu terim, robotların öğrenme gücünün kontrol edilmesi anlamına gelir. Akademik tanımda, öğrenme kontrolü, bir robotun bir görev hakkında öğrenme sürecini kontrol edebilmesi anlamına gelir.
Örnek olarak, bir robotun bir kapıyı açması görevini öğrenmesi söz konusu olabilir. Bu görev için robot, kapıyı açmak için gerekli adımları öğrenmelidir. Robotun bunu yapabilmesi için, öğrenme kontrolü özelliği kullanılır. Bu özellik, robotun öğrenme sürecini kontrol etmesine ve kapıyı açmayı öğrenmesine yardımcı olur.
Robotik Algılama Uzaktan Sensörleri: Robotik Algılama Uzaktan Sensörleri, robotların çevreyi algılamasını sağlayan sensörlerdir. Bunlar, robotun çevresi hakkında bilgi edinmesini ve davranışlarını değiştirmesini sağlayan veriyi toplamak için kullanılır. Robotik algılama uzaktan sensörleri, genellikle farklı ışık, ses, hareket veya dokunma sensörleri kullanarak verileri toplamak için kullanılır. Örneğin, hareket sensörleri, robotun çevresindeki harekete tepki verebilmesini sağlayabilir, bu da robotun çevreye karşı daha duyarlı olmasını sağlar.
İnsan Benzeri Robotik Sistemler: İnsan Benzeri Robotik Sistemler, insanların yerine yapılan, insan benzeri özellikleri olan, yüksek derecede otomatikleştirilmiş robot sistemleri olarak tanımlanır. Bu sistemler, insanların doğal kabiliyetlerini ve hareketlerini taklit edebilen, fiziksel, davranışsal veya davranışsal olarak robotik sistemler olarak kabul edilir.
Örnek olarak, bir çalışma ortamında, çalışanların ve müşterilerin rahat etmesi için, insan benzeri robotik sistemler kullanılabilir. Bu sistemler, çalışanların ve müşterilerin güvenliğini ve konforunu artırmak için uygun bir biçimde tasarlanmış robot tasarımları ve programlama aracıları aracılığıyla çalışır. Bu robotlar, insanların doğal hareketlerini ve davranışlarını taklit ederek, çalışma ortamının daha güvenli ve rahat bir ortama dönüşmesine yardımcı olabilir.
Yapay Sinir Ağı Tabanlı Kontrol: Yapay Sinir Ağı Tabanlı Kontrol, kontrol sistemlerinde kullanılan kontrol stratejisinin bir alt türüdür. Bu tür kontrol stratejisi, bir yapay sinir ağının kullanılmasını gerektirir. Yapay sinir ağları, gerçekteki sinir sistemlerinin biyolojik temellerinden esinlenen, çok katmanlı bir algoritma olarak tanımlanır. Bu algoritma, verileri girdi olarak alır ve girdinin özelliklerine göre, ağdaki çeşitli ağırlıkların değişmesiyle çıktı verir. Bu kontrol stratejisi, çeşitli girdi parametrelerinin kontrol edilmesi, kontrol edilmesi veya yönetilmesi için kullanılabilir.
Örnek olarak, bir robotun bir aracın yolu takip etmesi durumunda, robotun kendini yolun üzerinde tutması için kullanılabilir. Yolu takip etmek için, robotun her adımda konumunu ve yönelimini gözlemlemek gerekir. Bu bilgi, yapay sinir ağının girdileri olarak alınır ve ağdaki ağırlıkların değişmesiyle, robotun hangi yönde gideceğine karar verilir.
Robotik Kodlamayı Öğrenmek Neden Önemli?
Robotik Kodlamanın öğrenilmesi, robotik sistemlerin tasarımı ve programlanması için temel kavramların öğrenilmesine ve uygulanmasına yardımcı olacaktır. Robotik Kodlama, insanların çevrelerindeki fiziksel ortamları daha iyi anlamalarına ve bunu kodlama ile kontrol etmelerine olanak sağlamaktadır.
Robotik kodlamayı öğrenmek, çok yönlü bir süreçtir. Bu makalede, robotik kodlamayı öğrenme sürecinin temel adımlarını anlamanıza yardımcı olmak amacıyla temel kavramları ele aldık. Robotik kodlamayı öğrenmek, temel programlama dillerini öğrenmek, robotik algoritmalarını öğrenmek ve robotik sistemleri test etmek ve optimize etmek gibi çeşitli aşamaların tamamlanmasını gerektirir. Tüm bunları öğrenebileceğiniz Robotik Kodlama eğitimimize mutlaka katılın.
Robotik Kodlama, insanlık için önemli bir araç olabilir, fakat onu kullanmak için öncelikle kendi içimize bakmamız gerekir.
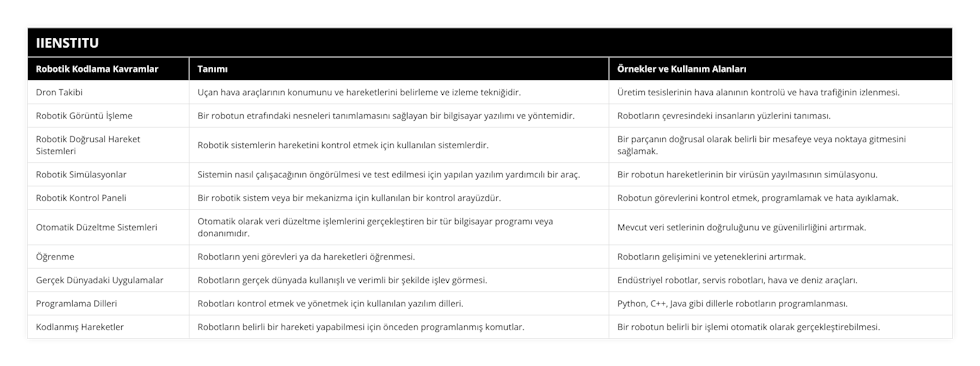

Koray Çalışkan, altı yılı aşkın süredir bu alanda çalışan bir web geliştiricisidir. Çeşitli programlama dillerinde deneyim sahibidir ve yeni diller öğrenmekten keyif almaktadır. Yaratıcı çözümler gerektiren karmaşık projeler üzerinde çalışmayı sever.